مقدمه:
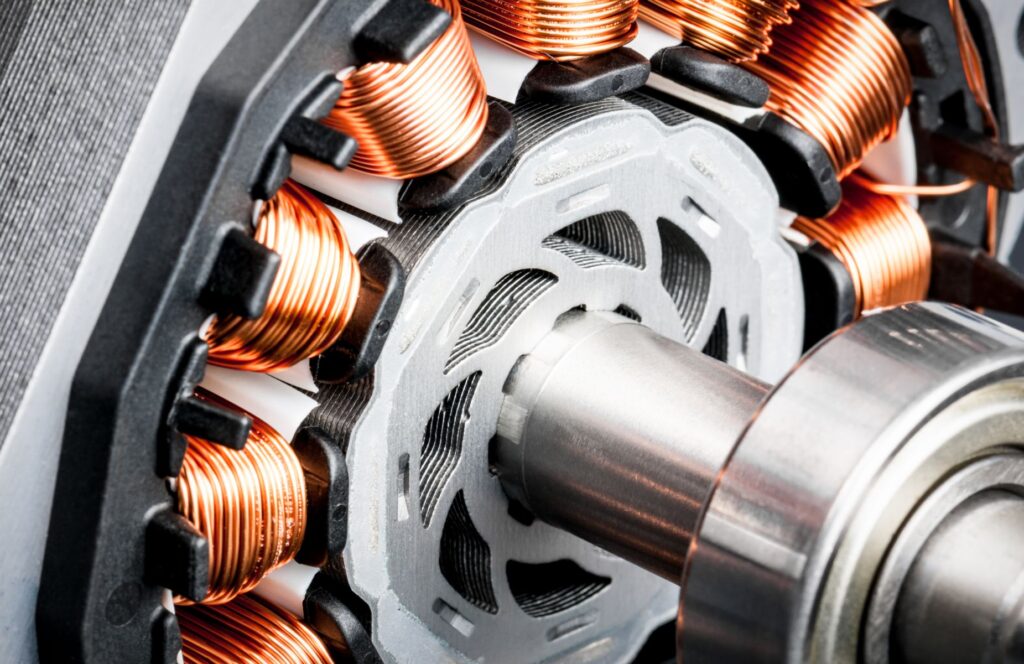
موتورهای براشلس (BLDC)بدون سنسور یک پیشرفت چشمگیر در فناوری موتورهای الکتریکی هستند که به کاربران امکان میدهند تا با کمترین پیچیدگی و نیاز به سنسورهای جانبی، موتورهای الکتریکی خود را بهصورت دقیق و با کارایی بالا کنترل کنند.
ویژگیهای برجسته:
یکی از ویژگیهای برجسته این نوع موتورها، عدم نیاز به سنسورهای جانبی برای تشخیص موقعیت و سرعت است. این موتورها با استفاده از الگوریتمهای پیشرفته و بازخورد سرعت و جریان، توانستهاند نقص این سنسورها را جبران کرده و به کاربران این امکان را بدهند که بهطور دقیق موتورهای خود را کنترل کنند.
نحوه عملکرد:
در موتورهای براشلس بدون سنسور، از پدیدههای الکترومغناطیسی مانند back-EMF استفاده میشود تا موقعیت و سرعت موتور را مشخص کند. این ولتاژ معکوس با تغییرات در حالت و سرعت موتور تولید میشود و به عنوان یک نوع بازخورد، در فرایند کنترل موتور مورد استفاده قرار میگیرد.
کاربردها:
از موتورهای براشلس بدون سنسور به خاطر سادگی کنترل و کارایی بالا، در انواعی از دستگاهها از جمله دستگاههای الکتریکی خانگی، رباتیک، و ابزارهای صنعتی استفاده میشود. این موتورها با امکاناتی که فراهم میآورند، به کاربران این امکان را میدهند تا با بهترین عملکرد و کارایی موتور، پروژهها و ابتکارات خود را پیش ببرند.
نحوه کنترل درایور:
موتورهای براشلس یکی از انواع موتورهای الکتریکی هستند که به وسیله براشلس (شمعکهای کوچکی که با استفاده از جریان الکتریکی به تماس با دیگر قطبها میآیند) کنترل میشوند. نحوه کنترل این موتورها به گونههای مختلف انجام میشود، از جمله کنترل با سنسورها و بدون سنسورها. در اینجا، به نحوه کنترل موتور براشلس بدون سنسور (سنسورلس) میپردازیم.
۱. الگوریتمهای کنترل
برای کنترل موتور براشلس بدون سنسور، از الگوریتمهای پیشرفتهای استفاده میشود. یکی از رایجترین الگوریتمها، الگوریتم کنترل فیدبک حالت موتور (Field Oriented Control یا به اختصار FOC) است. این الگوریتم با استفاده از بازخورد حالت موتور، سعی دارد تا جریان و ولتاژ موتور را بهطور دقیق کنترل کند.
۲. Back-EMF و بازخورد سرعت
Back-EMF یک ولتاژ معکوس است که در حین چرخش موتور تولید میشود. این ولتاژ معکوس با اندازه و سرعت موتور تغییر میکند و به عنوان یک نوع بازخورد، در فرایند کنترل موتور استفاده میشود. بازخورد سرعت نیز اطلاعات در مورد سرعت فعلی موتور را به الگوریتم کنترل میدهد.

۳. استفاده از متغیرهای PID
استفاده از کنترل PID (نسبت به خطا، اندازه، تکرار) نیز برای بهینهسازی عملکرد موتورهای براشلس بدون سنسور مفید است. این متغیرها با تنظیم صحیح، به کنترل دقیق جریان و سرعت موتور کمک میکنند.
خلاصه
مطالبی که شما اشاره کردید، در مورد موتورهای براشلس بدون سنسور میباشند. الان یک خلاصه از مزایا و معایب این نوع موتورها را ارائه میدهم:
مزایا:
کمپاکت و سبک:
موتورهای براشلس بدون سنسور به دلیل عدم نیاز به سنسورهای جانبی، ساختار کمحجم و سبکی دارند.
کنترل دقیق:
از الگوریتمهای پیشرفتهای برای کنترل استفاده میکنند (مانند FOC)، که امکان کنترل دقیق و با کارایی بالا را فراهم میآورد.
کمترین توقف:
عدم وابستگی به سنسورها به این موتورها اجازه میدهد که در مقابل شرایط مختلف، مانند اهتزازات یا تغییرات دما، بهتر عمل کنند.
کارآیی بالا:
موتورهای براشلس بدون سنسور معمولاً با کارایی بالا و بازدهی مناسبی عمل میکنند.
معایب:
پیچیدگی برنامهنویسی:
نیاز به الگوریتمهای پیچیده و تنظیمات دقیق برای کنترل موتورها، ممکن است نیاز به مهارتهای برنامهنویسی پیشرفته داشته باشد.
قابلیت کمتر در سرعت پایین:
در سرعت پایین، این موتورها ممکن است با عملکرد کمتری مواجه شوند و نیاز به سرعت بالا برای بهینهسازی کارایی داشته باشند.
قیمت بالاتر:
این نوع موتورها ممکن است به دلیل پیچیدگی الگوریتمها و نیاز به الکترونیک پیشرفته، قیمت بالاتری داشته باشند.
حساسیت به نوسانات برق:
حساسیت بیشتر به نوسانات و افت ولتاژ الکتریکی نسبت به موتورهای با سنسور.
با توجه به مزایا و معایب فوق، انتخاب استفاده از موتورهای براشلس بدون سنسور به میزانی به نیازها و استفاده موردنظر شما بستگی دارد.